苏黎世联邦理工学院的研究人员最近开发了用于机器人运动的人造肌肉。与以前的技术相比,他们的解决方案有几个优势:它可以用于机器人需要柔软而不是刚性的地方,也可以用于机器人在与环境互动时需要更敏感的地方。
许多机器人专家梦想制造的机器人不仅是金属或其他坚硬材料与马达的组合,而且更柔软,适应性更强。
软机器人可以以一种完全不同的方式与环境互动;例如,它们可以像人类的四肢一样缓冲冲击,或者巧妙地抓住物体。这也将在能源消耗方面带来好处;今天的机器人运动通常需要大量的能量来保持一个位置,而软系统也可以很好地储存能量。那么,还有什么比以人体肌肉为模型并试图重建它更明显的呢?
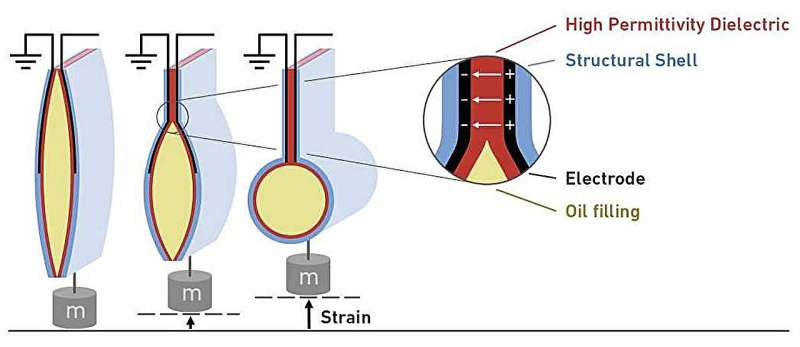
因此,人造肌肉的功能是基于生物学的。和天然肌肉一样,人造肌肉也会因电脉冲而收缩。然而,人造肌肉不是由细胞和纤维组成的,而是由一个装满液体(通常是油)的袋子组成的,袋子的外壳部分覆盖着电极。
当这些电极接收到电压时,它们会聚集在一起,将液体推入袋子的其余部分,袋子会弯曲,从而能够举起重物。单个眼袋类似于一小束肌肉纤维;其中几个可以连接起来形成一个完整的推进元件,也被称为执行器或简单地称为人造肌肉。


电压过高
开发人造肌肉的想法并不新鲜,但到目前为止,实现它的一个主要障碍是:静电致动器只能在大约6000到10000伏特的极高电压下工作。这个要求有几个分支;例如,肌肉必须连接到又大又重的电压放大器;它们不能在水中工作;而且它们对人类并不完全安全。
现在,苏黎世联邦理工学院的机器人教授罗伯特·卡兹曼与斯蒂芬-丹尼尔·格拉威特、埃利亚·瓦里尼和其他同事一起开发了一种新的解决方案。他们在《科学进展》杂志上发表了他们的人造肌肉版本,它有几个优点。
格拉威是卡兹曼实验室的一名科学助理,他为这个袋子设计了一个外壳。研究人员称这种新型人造肌肉为HALVE致动器,HALVE代表“液压放大低压静电”。
“在其他执行器中,电极位于外壳的外部。在我们的大脑中,外壳由不同的层组成。我们采用了一种高介电常数的铁电材料,即一种可以储存相对大量电能的材料,并将其与一层电极结合起来。接下来,我们给它涂上一层聚合物外壳,它具有优异的机械性能,使袋子更加稳定,”Gravert解释说。
这意味着研究人员可以降低所需的电压,因为铁电材料的高介电常数允许在低电压下产生大的力。Gravert和Varini不仅共同开发了half执行器的外壳,而且他们还在实验室中自己制造了执行器,用于两个机器人。
抓手和鱼展示了肌肉的功能
其中一个机器人的例子是一个11厘米高,有两个手指的抓手。每个手指由三个串联的halfve执行器移动。一个小型电池供电的电源为机器人提供900伏的电压。
电池和电源的重量加起来只有15克。整个抓手,包括动力和控制电子设备,重45克。当一个光滑的塑料物体被一根绳子吊到空中时,这种夹持器可以牢牢地抓住它,足以支撑它自身的重量。
“这个例子很好地展示了HALVE执行器的小、轻和高效。这也意味着我们离创造综合肌肉操作系统的目标又近了一大步,”卡兹曼满意地说。
第二个物体是一个像鱼一样的游泳者,大约30厘米长,可以在水中平稳地移动。它由一个包含电子设备的“头部”和一个柔性的“身体”组成,“身体”与half执行器相连。这些致动器以一种产生游泳运动的节奏交替运动。这种自动鱼可以在14秒内从静止到每秒3厘米的速度——这是在正常的自来水中。
防水、自密封
第二个例子很重要,因为它展示了HALVE执行器的另一个新特性:由于电极不再不受保护地放在外壳外面,人造肌肉现在是防水的,也可以用于导电液体。
“鱼说明了这些驱动器的一个普遍优势——电极不受环境的影响,反过来,环境也不受电极的影响。因此,你可以在水中操作这些静电致动器,或者触摸它们,”卡兹曼解释说。袋子的分层结构还有另一个优点:新的驱动器比其他人造肌肉要坚固得多。
理想情况下,袋子应该能够实现大量的运动,并迅速完成。然而,即使是最小的生产错误,比如电极之间的一粒灰尘,也会导致电故障——一种小型雷击。
“当这种情况发生在早期的模型中时,电极会燃烧,在外壳上形成一个洞。这使得液体逸出,使致动器失效。”
这个问题在halfve执行器中得到了解决,因为由于保护塑料外层,单个孔基本上是自动关闭的。因此,即使在发生电气故障后,眼袋通常也能保持完整的功能。
两位研究人员显然很高兴在人造肌肉的发展上迈出了决定性的一步,但他们也很现实。
正如卡兹曼所说:“现在我们必须为大规模生产这项技术做好准备,而我们不能在ETH实验室里做到这一点。在不透露太多信息的情况下,我可以说,已经有一些公司对我们感兴趣,愿意与我们合作。”
例如,人造肌肉有一天可以用于新型机器人、假肢或可穿戴设备;换句话说,就是穿戴在人体上的技术。
更多信息:Stephan-Daniel Gravert等人,无系绳机器人的低压电液执行器,Science Advances(2024)。DOI: 10.1126 / sciadv。期刊信息:苏黎世联邦理工学院提供的科学进展引文:为机器人运动开发的软人造肌肉(2024,1月30日)检索自2024年1月30日https://techxplore.com/news/2024-01-soft-artificial-muscles-robot-motion.html。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。